两相、三相PM型永磁步进电机的结构、旋转原理及特性
前一节课是根据定子相数进行步进电机的分类,从本节课开始即后面的两节课将根据转子的结构对步进电机进行分类。
PM(Permanent Magnet,永久磁铁)型转子为内转子型(外部为定子,中间为气隙的电机),圆柱形转子的外表面分布N、S极(外表面无齿)。
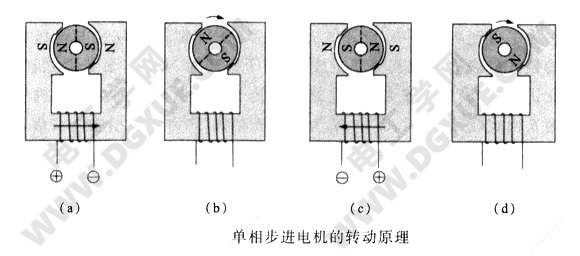
单相PM型步进电机
根据步进电机相数分类的单相步进电机如下图所示。有关内容在前节已经说明,此处不再赘述。
两相PM型步进电机
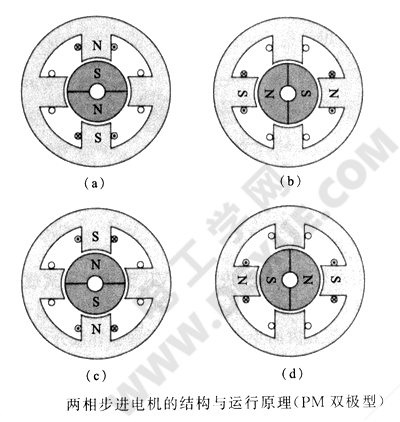
如下图所示的两相步进电机为例,定子绕组在圆周上分布排列,最简单的转子极数为2,即极对数Nr=1。
根据式θs=180°/PNr,令P=2,则机械角θs=90°/Nr,此90°为电气角表示的步距角,电气角除以Nr即为机械角。转子极数为2,即Nr=1,则电气步距角与机械步距角相等,为90°(θs=90°/PNr)。
两相PM型电机定子内圆有四个磁极,每个磁极上绕了一个线圈,每两个相差180°的磁极线圈组成一相绕组,PM型步进电机的单极和双极工作方式在上文“两相步进电机”中均已说明。
下面以单极工作方式为例说明步进电机的旋转原理,如下图所示,可知转子步距角为90°,4步旋转一周(360°)。

图中在一个磁极上绕了两个线圈,每个线圈的激磁电流只流一个方向的电流,故图(a)中A相线圈为下层线圈,“杠A”为上层线圈。步进1状态,给1相下层线圈A相通电,在上磁极产生N极,下磁极产生S 极,利用定转子磁极异性相吸,直至平衡位置。
然后1相电流断开,2相线圈B相接通电流,定子磁极左边为S极,右边为N极,吸引转子顺时针旋转90°,转到步进2状态,如图(b)所示。再次电流切换到1相线圈“杠A”相,1相磁极反转,转子顺方向(顺时针方向)旋转。如磁极上为单线圈,则线圈需要流过正反向电流(此为双向驱动,Bipolar)。
图中1相有两个线圈,电流单向流过,两个线圈产生的极性相反,给“杠A”线圈通电,磁极极性反转成为图中(c)所示状态。同样原理,2相线圈依靠电流的方向的变化,使其磁极极性从第2步变成第4步的极性,使转子旋转到图(d)状态,此时,转子由第3步顺时针转过90°到第4步。不断重复进行第1步至第4步,转子就连续旋转。如要逆时针旋转,只要使第2步与第4步的定子极性相反即可。
两相PM型爪极步进电机
两相PM型爪极步进电机的结构如下图所示,定子相绕组不像前面介绍的电机一样分布在圆周上,而是轴向放置,这种相绕组安装方式称为从属型结构。
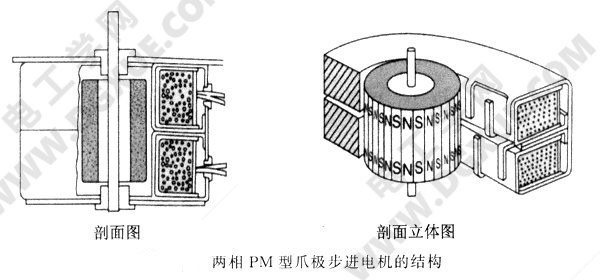
转子为圆柱形永久磁铁,其中心安装了输出轴。圆柱形永久磁铁的圆周外表面交替分布着N极和S极,极对数为Nr,N、S极等极距。其转子磁极通过气隙,对着定子磁极。定子磁极依其形状称为爪极(claw pole),由导磁钢板冲压成型,形成Nr个爪极。两个定子极板其磁极交互安放,相差1/2极距,共2Nr个与转子磁极数2Nr相对应,形成一相定子。
定子为爪极型的步进电机,气隙为0.2mm(比HB型步进电机的气隙大3~4倍)。其分辨率与相同尺寸的HB型步进电机相比相差1/4。与相同尺寸的HB型步进电机相比,其转矩只有1/3。决定步距角的分辨率由式θs=180°/PNr得知,如P=2,则θs=90°/Nr。若Nr=5~12,则步距角θs为1.8°~7. 5°,通常使用7. 5°。
下图示为PM型步进电机的外观及PM型步进电机(42×长度27mm,步距角7.5°)的速度-转矩特性[与尺寸接近的 HB型步进电机(39×长度27mm,步距角1.8°)比较]。因为HB型为方形,其对角线为42mm以上,而且转子为永久磁铁,PM型为便宜的铁氧体磁铁,HB为钕铁硼磁铁,极对数相同,且PM型的气隙比HB型大3倍以上,故转矩差如此之大也是必然。关于最高转速和电气时间常数(线圈电感除以电阻之值)的差异,仅供参考。

此种PM型步进电机的最大特点为价格便宜。从成本角度分析如下。
PM型转子通常使用铁氧体磁铁等低成本材料,轴承使用金属滑动轴承(Sleeve metal),导磁材料使用电工钢板,从材料费方面考虑做到低成本的设计。线圈卷绕在线圈骨架上,可提高绕线效率,节省绕线时间。线圈端头采用低价接线端子。与相同尺寸大小的HB型相比,只有其价格的1/3。使用的数量为HB型的3倍以上,其使用量有逐年增加的趋势。
两相PM型爪极步进电机的旋转原理
两相PM型爪极步进电机的旋转原理与本文开头的两相PM型分布线圈步进电机的旋转原理基本相同。但是,本文第一张图可知,一个线圈只能给一个磁极激磁,然而爪极电机的一相线圈可以给多极激磁。下图示出爪极步进电机的旋转原理。实际的两相PM型爪极步进电机,设计的多极Nr=12,此时定子的爪极数每相有12对极。为简化原理便于理解,下图将一相简化成一对极。实际的两相步进电机两相绕组同时激磁,通常作2相激磁驱动,为说明和理解容易,简化为一相激磁状态的说明,一相激磁如能驱动转子旋转,两相激磁肯定也能运转。

如上图所示,St1、St2为定子的两相绕组,各线圈如图所示方向绕制。Rt为转子,采用铁氧体磁铁构成,N、S极分布在转子外表面,与定子极之间形成工作气隙。由图知道,一相线圈激磁一对定子磁极,转子极对数与定子极对数的节距相同,相邻转子的S极与N极必定相互吸引,产生电磁力。该点与后面叙述的HB型和RM型不同。
- 第一步,图(a)为1相线圈激磁图,转子与定子St1的磁极互相异性相吸。如果此时施加外力,转子会带着负载移动,电磁力会产生图(a)所示位置的恢复力,负载力的大小决定了位置精度。此时,2相定子St2的磁极中心线在转子磁极N、S极的中间位置,2相定子与转子磁极中心线相差π/2,此位移角为一个步距角。
- 第二步,图(b)中,Stl的线圈电流为OFF,St2的线圈电流变成ON,转子向右移动π/2,转子被St2吸引而停止。
- 第三步,图(c)中,Stl的线圈电流反向通电,定子极性反转,转子再旋转π/2后静止。
- 第四步,图(d)中,St2的线圈电流反向通电,定子极性反转,转子再旋转π/2后静止。
再返回图(3),依次(b)、(c)、(d)反复循环,不断旋转。以上为两相PM型爪极步进电机的运行原理。
根据以上叙述,一个步距角为转子磁极极距的1/2,走4步为一个循环。步距角由转子的极数来决定,定子的极数对转矩的增加有影响。当然,此型步进电机有单极(uni-polar)型和双极(Bi-polar)型,均伴随定子磁极磁化而旋转,反转亦相同。
三相PM型爪极步进电机
本步进电机的三相定子绕组在轴向三重配置,三相Y(三个线圈的末端接在一起,简称星形)或△(三个线圈首尾相接,简称三角形)接出三个出线端,为三相驱动PM型爪极步进电机。三相PM型爪极步进电机的结构如下图所示。
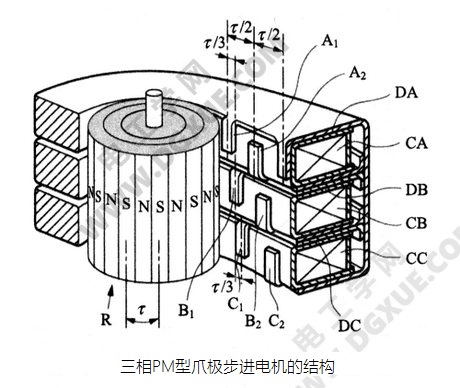
转子R的结构完全与两相步进电机相同。定子每相结构基本上与两相步进电机的相同。与两相步进电机不同的是定子三个相的配置角度不同。上图为三相PM型爪极步进电机的结构,立体剖面图只表示定子与转子结构。转子R与两相PM型步进电机相同,其外表面为N、S 极,极对数为Nr。如图所示,转子R的极对数的节距为τ。定子由A、B、C相组成,各线圈绕制成DA、DB、DC的环状线圈,以CA、CB、CC在转子轴方向纵向配置,线圈CA激磁形成A相的磁极A1和A2,CB激磁形成B相的磁极B1和B2,CC激磁形成C相的磁极C1和C2。此电机转子极对数节距为τ,A1与A2,B1与B2,C1与C2各相差τ/2,A1、B1、C1各相差τ/3,故相邻相A2与B1,B2与C1之间相差τ/6。
此步进电机的运行原理如下图所示:
 此图各定子相磁极的符号与上面的三相PM型爪极步进电机的结构图相同,两图对照来看。三个线圈CA、CB、CC为Y连接,如用△(三角形)接法也能同样运行。例如,如图(a)所示,A相B相间加电压,两个线圈磁通方向相反如箭头所示。该激磁驱动电路如下图所示。
此图各定子相磁极的符号与上面的三相PM型爪极步进电机的结构图相同,两图对照来看。三个线圈CA、CB、CC为Y连接,如用△(三角形)接法也能同样运行。例如,如图(a)所示,A相B相间加电压,两个线圈磁通方向相反如箭头所示。该激磁驱动电路如下图所示。
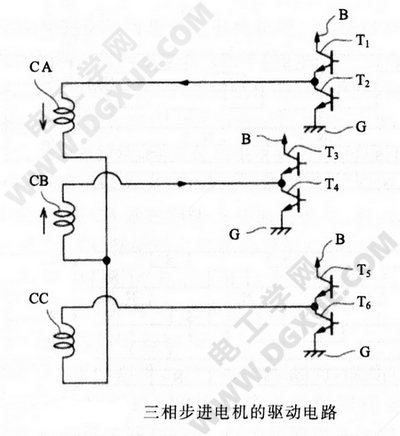
T1~T6为功率管,各相线圈接法如图所示,T1~T6的B端为电源端,G端为接地端。
T1~T6导通顺序如下表所示,O表示功率管导通,由此给Y接法的3个端子中的两个加正负电压。由于三个线圈的尾端短接,必定使两相绕组顺次激磁,即三相绕组两相激磁驱动。两相PM型步进 电机以两相激磁方式驱动(如上文之中的两相PM型爪极步进电机的运行原理图),此时两相激磁,转子R的磁极静止在两相定子磁极之间。
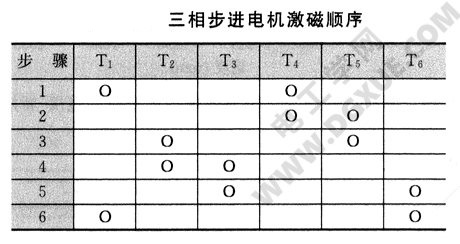
- 第一步:T1与T4导通,A相与B相激磁。如上面的三相PM步进电机运行原理图(a)所示,A相与B相激磁,箭头方向为两绕组线圈产生的磁通方向,A相与B相磁极极性图中也有标识。由此,转子R被吸引到稳定位置。
- 第二步:T1关断,T5变成导通,T4与T5导通,B相和C相激磁,如上面的三相PM步进电机运行原理图(b)所示,B相和C相的线圈磁通方向相反。此时,转子R 从图(a)位置向左移动τ/6的稳定位置,τ/6为三相永磁步进电机的步距角,即步距角为转子一对极极距的1/6。与两相永磁步进电机的1/4相比,分辨率提高1.5倍。
- 第三步:T4关断,T2变成导通,C相和A相的线圈导通,转子移动到如上面的三相PM步进电机运行原理图(c)所示的稳定位置,转子R又向左移动τ/6。依次切换功率管,使定子绕组依次导通,实现上面的三相PM步进电机运行原理图(d)、(e)、(f)步骤的激磁,使转子依次步进。六步一个循环,转子移动一对极的极距,如此反复循环。与PM型爪极步进电机的特点不同,三相PM型与两相PM型的步进电机相同,转子磁场从N极发出,相邻S极返回,与定子线圈交链。
图(三相PM型爪极步进电机的结构)中A、B、C(A1、B1、C1)相差τ/3即电气角120。,各相偏差τ/6,图(三相PM步进电机的运行原理)的接线方式还不能达到连续步进的动作,要将B相线圈与其他的A相和C相反接才行,即绕制方向相同的三个线圈,将其中一个反接,并装配成一体。
下图为相同尺寸和同一转子的两相PM型与三相PM型步进电机的速度—转矩特性。
 其速度—振动特性如下图所示。
其速度—振动特性如下图所示。

转矩特性方面,三相PM型步进电机在高速旋转时转矩较高;振动特性中三相PM型在步进电机低速下比较小;相应的噪音特性与两相PM型电机相比有更大改善。总之,三相PM型步进电机虽然结构比两相PM型步进电机复杂,但性价比更好。
下表为试验电机参数,即相同尺寸的两相HB型与三相PM型步进电机的参数。

下图为两种电机的速度—转矩特性及其速度-噪音特性:

速度—转矩特性两者相差不多,三相PM型电机的噪音特性约低10dB。在分辨率和寿命及其成本都能满足要求时,三相PM型电机较两相HB型电机振动噪音更低。
看了本文的人还看了
- 视频:直流电机的基本工作原理
- 视频:三相异步电动机的转动原理
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
- 步进电机:细分步进驱动
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号