步进电机动态特性的三种测量方法
下面介绍速度-动态转矩(dynamic torque)特性的测量法。步进电机的动态转矩有最大失步转矩与起动转矩。这两种转矩随驱动频率的增加而下降,原因是由于线圈的电抗增加,电流减少造成的。在低速运行时,其运行在振动带区域,转矩会突然下降,此为转子的自然振动频率与驱动频率共振产生的现象;或者,在转子转动方向突然发生改变瞬间,同时接收到驱动指令脉冲,也会产生此现象。这些现象均需要正确测量电磁转矩。本节介绍3种测量转矩的方法及其测量原理。
滑轮平衡法
此测定电机转矩的方法与普罗尼制动(prony brake)原理相同。滑轮用线绕几圈,线一端挂弹簧秤,滑轮与线之间产生滑动摩擦测量转矩。下左图表示滑轮平衡法。
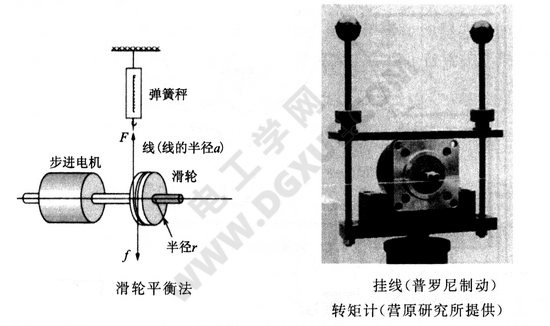
根据左图,转矩T变成下式:
T=(F-f)(r+a)=Fr+Fa-fr-fa
上式中,f为线的张力,F为弹簧力,a为线的半径,r为滑轮的半径。
测量时,如f/F=0.01,a/r=0.01,则上式变成如下:
T=Fr(1-10-4)≈Fr
即式中的f、a被忽略。
此种方式的动态转矩计,釆用营原研究所的挂线(普罗尼制动)方式,电脑画面会显示转矩曲线。其挂线的形式如上右图所示。
磁滞制动法
因磁滞制动由低速到高速有稳定的制动力关系,转矩计使用很多,其原理为磁场中的磁滞力将对运行中的被测电机施加制动力制动。此时,反作用转矩会作用到磁滞转子的定子上,此时用测力器(load cell)测出。
制动力用产生磁场的线圈电流能任意设定。但磁滞转子的惯量大是其缺点,输出转矩为100mN•m以下的小型步进电机普遍采用此方法。
扭力棒转矩测量法
利用棒的扭力角与转矩成比例的方法。扭力棒用2组刻度圆盘夹住,转矩加在棒上时,产生的扭力角度θ,用光学方法测量,再由下式计算转矩T:
θ=32LT/(πGD4)
式中,D为扭力棒直径,G为系数。下图表示扭力棒转矩测量法的使用原理。
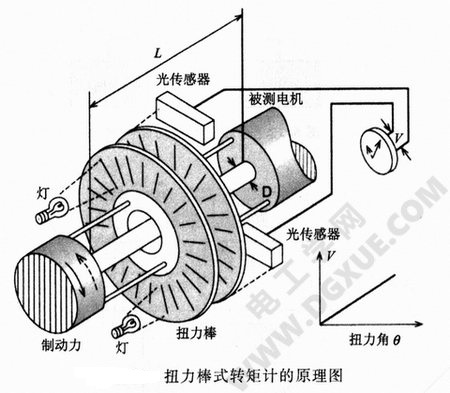
此种试验方法的优点是低惯量、高精度测量。此测力器(应变计)方式要求高灵敏度放大器,以便避免应变计的再调整,以应对转矩信号范围大的缘故。缺点是容易产生扭力振动等问题。
看了本文的人还看了
- 视频:三相异步电动机的转矩和机械特性
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
- 步进电机:细分步进驱动
- 步进电机的激磁方式
- 步进电机单极驱动与双极驱动比较
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号