步进电机附加制动驱动方法:反相序激磁与最终步进延迟
用两个图来解释步进电机的这两种附加制动的驱动方法。
反相序激磁制动
如下图表示反相序激磁制动。步进电机的定位点在B相处,即最后停止位置在B相,因转子仍受A相激磁,须将A相OFF,B相来激磁,转子由A相稳定点运行到B相稳定点,照此运行,则转子会超越B相的平衡点,并在平衡点来回振荡直至稳定下来。
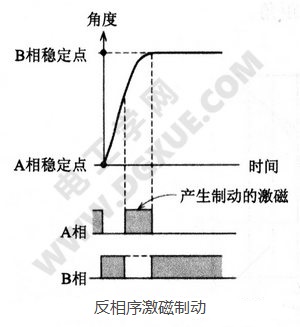
与此相对,转子由A相向B相运行时,B相的绕组激磁OFF,在超过B相稳定点的某一瞬间,A相激磁将其转子的动能用A相制动消耗掉,然后再给B相激磁,在B相稳定点停止。因此,如上图所示,无超调量的转子逐渐停止。此时,制动激磁电流开始的瞬间和制动时间非常影响制动效果。因此,为了达到制动效果,需要反馈转子的速度或位置信号,作闭环控制以确定何时作制动反相激磁。
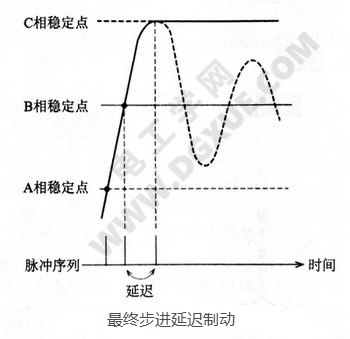
最终步进延迟制动
以一定脉冲频率驱动步进电机,对最终停止相的指令脉冲进行延迟控制,延迟时间为在最终停止相的前一相的相超调峰值时刻,给最终相施加激磁脉冲。如下图所示,B相的超越峰值位置接近最终停止的C相,C相激磁后,无超调停止。
看了本文的人还看了
- 视频:三相异步电动机的制动
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
- 步进电机:细分步进驱动
- 步进电机的激磁方式
- 步进电机单极驱动与双极驱动比较
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号