PM型永磁步进电机转矩的产生及负载角
步进电机可视为多极同步电机。同步电机的定子产生的磁场吸引转子磁极,使转子磁场与定子磁场同步旋转。如施加负载,转子磁场与定子磁场将保持某角度偏差,使转子上产生与负载平衡的电磁转矩,此偏差角度称为功率角。
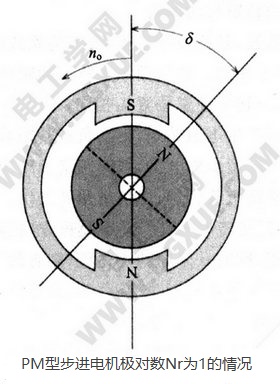
如下图所示,定子位于气隙外侧,转子位于气隙内侧,定子与转子皆为永久磁铁。外侧的定子以心速度逆时针旋转,代表旋转磁场。此时,如施加负载转矩TL,只使转子磁极轴线与定子磁极轴线偏差功率角心δ,转子仍与定子磁场以同步转速n0旋转。
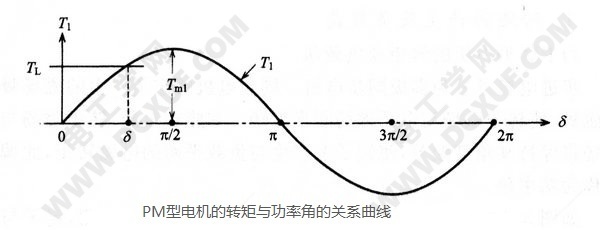
因为转子产生的输出转矩T1与负载角成正弦关系变化,最大转矩为Tm1,则表达式为:
T1=Tm1sinδ
故负载转矩TL与δ平衡。下图的纵轴表示转矩T1,横轴表示负载角,δ=π/2位移角时,产生最大电磁转矩。当负载转矩大于最大电磁转矩时,δ>π/2,定子磁场将无法带着转子以同步速度旋转,此现象称为失步现象。实际步进电机的定子不是如前图所示的永久磁铁旋转,所谓两相电机,是指空间相差π/2的两个线圈,通过相差π/2相位差的交流电流后,产生旋转磁场。
看了本文的人还看了
- 视频:直流电机的基本工作原理
- 视频:三相异步电动机的转矩和机械特性
- 视频:三相异步电动机的转动原理
- 应用于自动机械、医疗器械及游戏机中的步进电机
- 旋转、摆动照明灯具中使用的步进电机
- 监控摄像机中使用的步进电机
- FDD(软盘驱动器)中使用的步进电机
- 打字机中使用的步进电机
- 传真机中的步进电机
- 复印机中的步进电机
- 步进电机位置定位精度的解决方法
- 步进电机改善暂态特性的解决方法
- 降低步进电机振动、噪音的解决方法
- 步进电机增加动态转矩的解决方法
- 选择步进电机的计算方法(附例题)
- 电机选择:根据使用环境来选用步进电机
- 电机选择:从转速变化率来选用步进电机
- 电机选择:从转速来选用步进电机
- 电机选择:步进电机位置定位精度的选用
- 根据步进电机种类、优缺点来选择电机
- 步进电机噪音、振动、速度变化的测量方法
- 步进电机暂态(阻尼)特性的测量
- 步进电机步距角度精度的测量
- 步进电机动态特性的三种测量方法
- 步进电机的静态转矩特性及测量方法
- 三相步进电机的驱动电路
- 步进电机附加制动驱动方法:反相序激磁与最终步进延迟
- 步进电机的加速、减速控制
- 步进电机闭环控制系统
- 步进电机三相细分驱动时的转矩
 鄂网公安备 42112502000017号
鄂网公安备 42112502000017号