主载波锁相环
主载波环用于锁定接收信号的主载波,其特点是接收信号载噪比极低、多普勒范围大、多普勒变化率高,因此,主载波在捕获上有很高的要求。主载波环接收机原理框图如图5-82所示。接收信号先进行非相干AGC,将信号控制到一定电平,该电平捕获单元完成在较大多普勒范围内的载波频率及频率一阶变化率的捕获;然后将捕获到的量植入主载波锁相环,使得锁相环进入快捕阶段,锁相环完成相位捕获;然后进行相干AGC控制,将输入信号电平稳定在期望值,环路稳定。
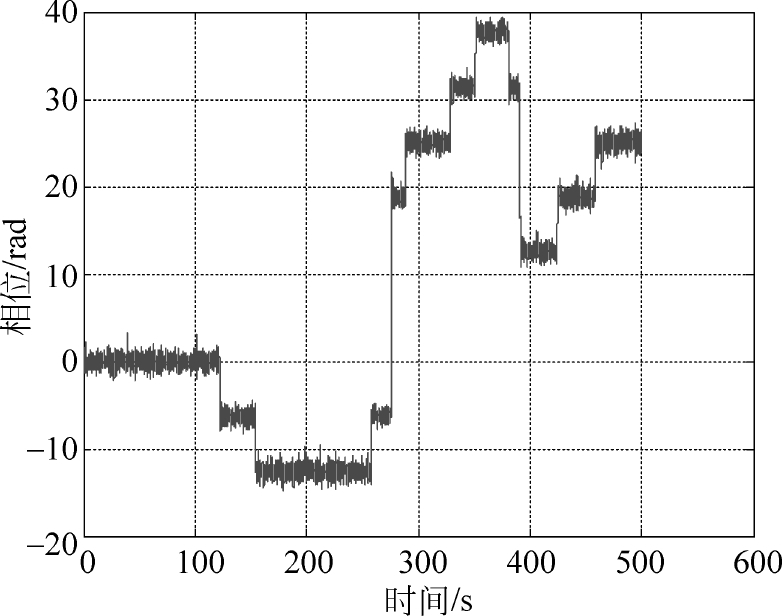
测速信息从主载波环提取,主载波锁定后得到接收载波的多普勒信息,测速结构框图如图5-83所示。

图5-83 测速结构框图
主载波锁定后,从环路滤波器中提取载波的多普勒信息,然后经过平滑换算得到速度信息。
加窗技术
在测控体制中,往往需解调方波调制的副载波,超窄带锁相环应用于方波副载波时,载波的抑制通常采用科斯塔斯环路结构。由于在深空通信中接收门限很低,因此环路会造成很大的平方损耗,平方损耗造成的相位均方根增大是不能通过减小环路带宽来抑制的。科斯塔斯环路是基于平稳信息得到的相位最大似然估计结构,而方波副载波信息位显然不是平稳的,因此为了减小环路的相位噪声,环路设计采用加窗的方式来减小相位方差,结构如图5-84所示。加窗后的鉴相器特性如图5-85所示。

图5-84 加窗的科斯塔斯环路结构

图5-85 不同宽度窗条件下的鉴相器特性
加窗后的鉴相范围变窄,但窗的加入使得环路输出相位噪声的方差减小,其输出相位方差表达式为

式中 W——加窗的占空比。
由式(5-65)可知,通过加窗的方式可以使得输出相位方差减小为不加窗时候的W倍。
仿真结果表明:在不同的等效输出信噪比下都有门限效应,但是可以通过改善输出信噪比来改善门限。
变带宽与变窗技术
环路带宽是调解环路动态响应速度和稳态噪声的重要参数,环路的锁定时间与带宽倒数呈正比,大约是带宽倒数的4~6倍,而达到稳定工作状态需达到其20倍。在深空通信中,信噪比最低达到0,理论上载波稳定锁定的带宽为0.1Hz,工程上数据稳定解调带宽需要更低,而侧音测距环路最窄达到0.001Hz,因此环路的锁定时间很长。一个解决的思路是在宽带宽情况下完成捕获,然后逐渐转窄带宽,带宽变换的目的是使环路快速稳定下来。
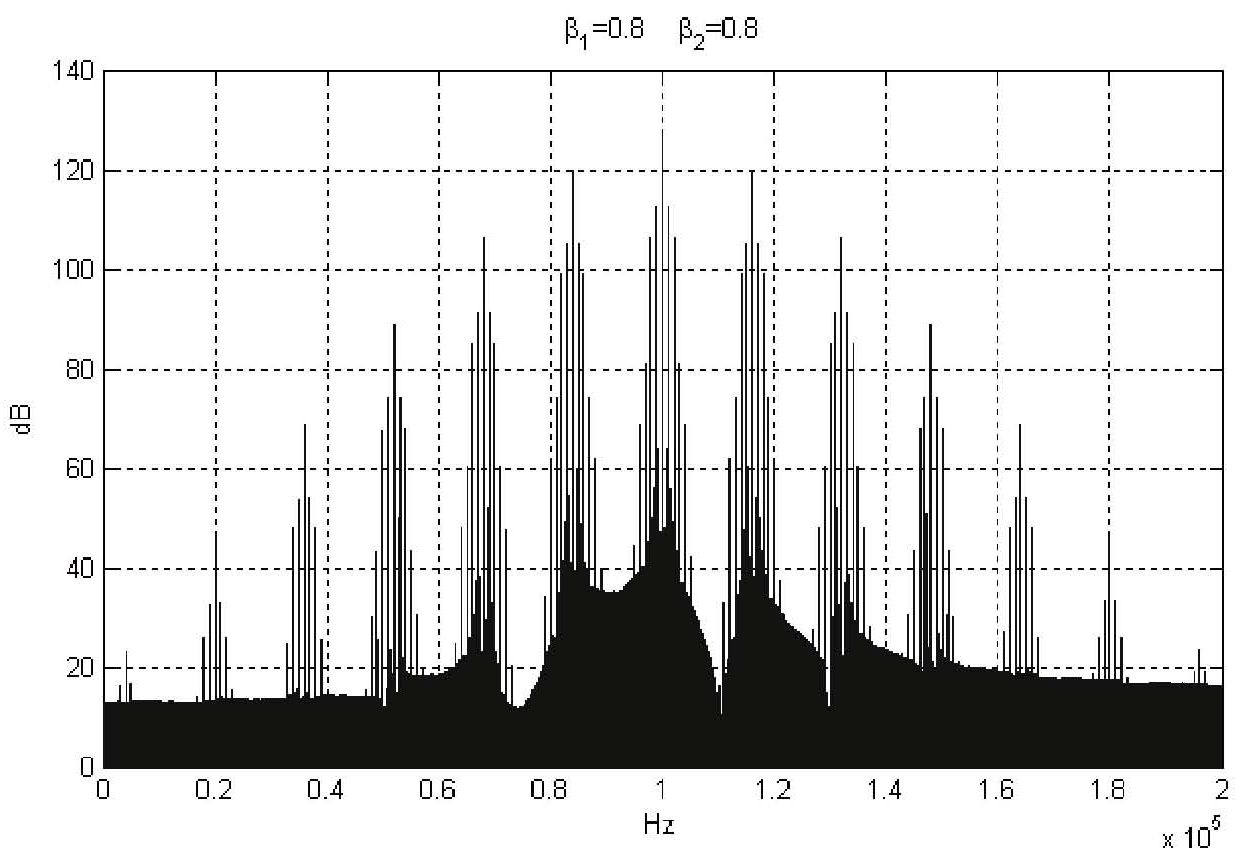
不同宽度窗下的相位噪声方差如图5-86所示。

图5-86 不同宽度窗下的相位噪声方差
从图5-86可以看出:环路加窗后鉴相器鉴相范围变窄,环路捕获带变窄,因此需要变窗技术辅助捕获。
定义τ=1/(2BL),可以得到带宽的变化公式:

对于加窗的环路,窗变化为

窗的初始占空比设置为100%。