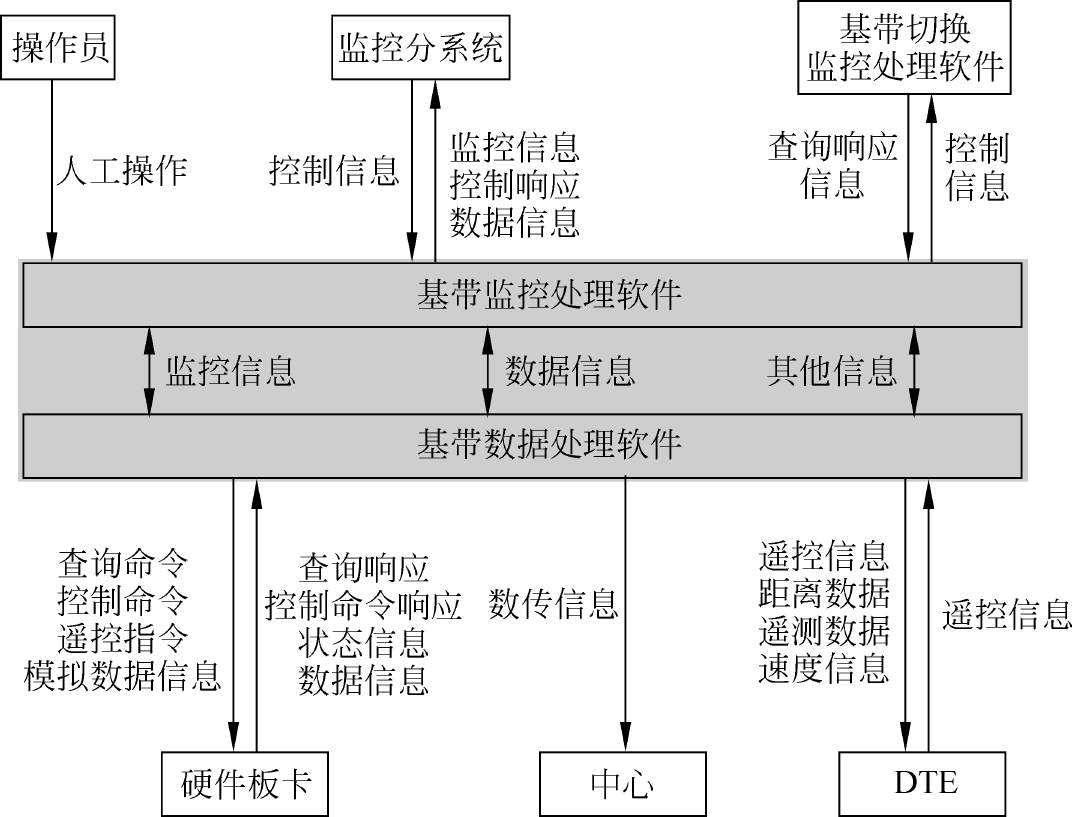
单套多功能数字基带原理框图见图5-6。基带设备接收控制中心经站监控分系统发送来的测控计划后,设置各单元工作参数,等待任务。任务中接收控制中心发送来的遥控指令,遥控指令经编码等处理后对遥控副载波进行PSK调制,已调遥控副载波和测距信号对70MHz载波进行PM调制。侧音测距时,测距信号为纯侧音,距离捕获时先发主音,主音锁定后再由高至低顺序发送次音(各侧音相位对齐),距离捕获完成后只发主音进行测距。音码混合测距时,测距信号为测距码对主侧音进行PM调制(调制指数为45°或22.5°),距离捕获时先发主音,主音锁定后再顺序发送由主音分频产生的各级测距码(对主音PM调制,调制指数为45°),距离捕获完成后,只发最后一级测距码(对主音PM调制,调制指数为22.5°)。每一个次侧音或测距码的发射维持时间取决于距离捕获相关器的积分时间(T1)和两个侧音(或测距码)间保护时间(T2),即第一次音(或第一测距码)发射后,经过T1+T2时间后发射下一个次音(或下一级测距码)。
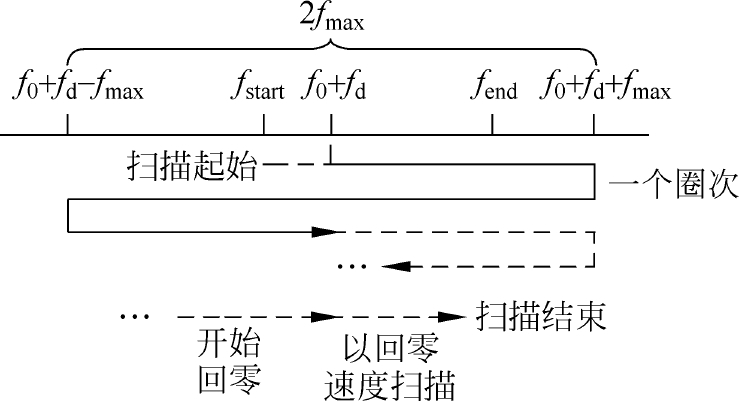
上行信号经上变频、功率放大后由天线发送到应答机。上行调制器具有频率补偿能力,可以根据控制参数预置上行信号频率或控制频率扫描,帮助应答机捕获上行信号。待双捕完成后,可控制扫描回零。

图5-6 多功能数字基带原理框图
下行信号经天线、LNA、下变频器后的测控和通道70MHz中频信号送基带设备。首先由频率快速捕获单元完成载波频率和频率变化率测量,将测量结果实时送测控主接收机载波锁相环,辅助载波环捕获跟踪,载波锁定后解调出遥测副载波和测距信号,送遥测单元和测距单元;同时由载波环路滤波器提取载波多普勒频率(或载波相位),完成速度数据提取。
遥测数据对副载波PSK调制,所以遥测单元需完成副载波捕获跟踪,捕获时可以利用载波多普勒对副载波频率补偿,辅助副载波环捕获跟踪;副载波锁定后解调出遥测数据,完成位同步、信道译码、帧同步等处理,遥测信息通过CPCI总线送基带计算机,在基带计算机按要求的数据协议打包,通过网络送数据传输分系统。
任务中,纯侧音测距分为两步:距离捕获和距离提取。距离捕获过程中,上行发主音,应答机转发,地面主接收机解调出主音送测距单元主音环,主音环捕获跟踪,捕获时可以利用载波多普勒对主音频率进行补偿,辅助主音环快速捕获。主音锁定后,上行由高至低顺序发送各次音,应答机转发,地面测距单元由主音分频构成分频链顺序恢复各本地次音,分别与接收各次音相关,求相位差,顺序调整分频链,恢复出最低次音,距离捕获完成。距离捕获完成后,继续发送主音,进行距离提取。双向测距时,测量上行最低音与本地最低音间的时延就可以提取双向传输距离。三向测距时,只需保证两个站之间的时间同步,两站侧音发送时刻相同,则在本站测量收发侧音间的时延同样可以完成距离提取。由于距离提取时,最低音由主音经分频链分频产生,其相位抖动完全取决于主音环的相位抖动,所以测距精度由主音决定。
音码混合测距时,测距信号为序列码对主音PSK调制,主音再对载波PM调制。测控主接收机锁定后,解调测距信号送测距单元。测距过程同样分为两步。距离捕获过程中,上行发主音,应答机转发,地面主接收机解调出主音送测距单元主音环,主音环捕获跟踪,捕获时可以利用载波多普勒对主音频率进行补偿,辅助主音环快速捕获。主音锁定后,主音二分频构成分频链,将各二分频信号异或产生各级测距码。上行由r1(t)~rn(t)顺序发送各级测距码,应答机转发,地面测距单元将本地测距码与接收测距码相关,根据相关值确定二分频极性,完成测距码捕获,解模糊码rn(t)捕获后,距离捕获完成。距离捕获完成后,继续发送rn(t)调制的主音,利用分频链恢复的本地解模糊码rn(t)进行距离提取。双向测距时,测量上行rn(t)与本地rn(t)间的时延就可以提取双向传输距离。三向测距时,只需保证两个站之间的时间同步,两站序列码发送时刻相同,则在本站测量收发rn(t)间的时延同样可以完成距离提取。由于距离提取时,rn(t)由主音经分频链分频产生,其相位抖动完全取决于主音环的相位抖动,所以测距精度由主音决定。
下行信号经天线、LNA、下变频器后的低速数传和通道70MHz中频信号送数传接收机,数传信号载波锁定后,解调输出数传数据,完成位同步、信道译码、帧同步、数据上报等处理后,数传信息通过CPCI总线送基带计算机,在基带计算机按要求的数据协议打包,通过网络送数据传输分系统。
和通道捕获信号载波后,将本地载波锁相环DCO信号送跟踪接收机,跟踪接收机接收和差双通道中频信号,利用主接收机的本地DCO信号下变频,去掉多普勒频率,窄带滤波,提取和差信号,和差鉴相提取角误差信息,送伺服分系统完成天线自跟踪。
基带切换设备直接接受监控分系统的控制,选择A机、B机角误差电压、AGC电压、锁定指示送天伺馈分系统,采集天伺馈分系统的角跟踪指示送监控分系统。