副反射面实时修正工作原理见《天伺馈系统工作原理:副面实时修正工作原理》,修正方法及数据标定方法如下。
天线副反射面电动调整

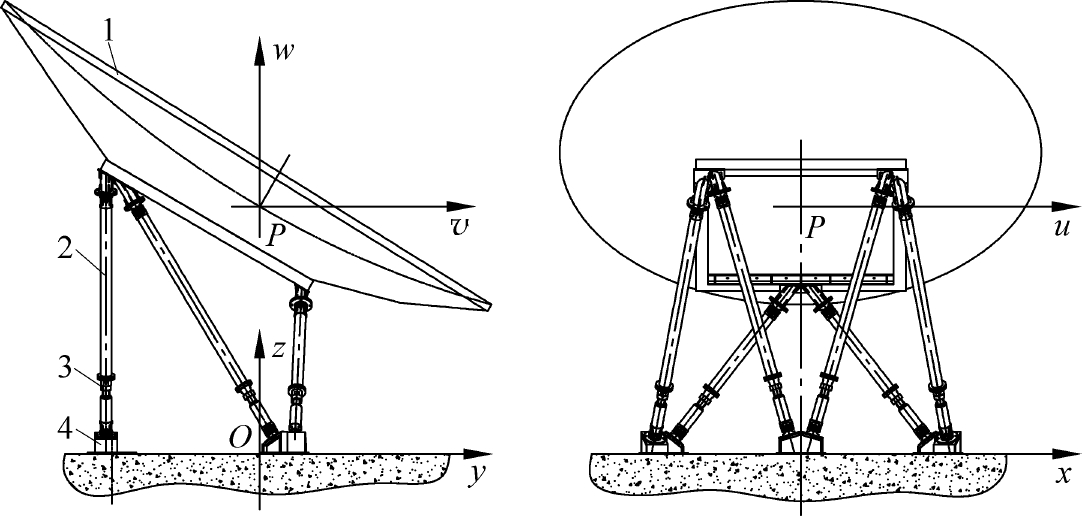
图2-30 副反射面电动调整自由度示意图
如图2-30所示,副反射面的位置可以用6个自由度加以描述,分别是x、y、z方向的位移和θx(绕x轴旋转)、θy(绕y轴旋转)、θz(绕z轴旋转)方向的旋转。由于副反射面相对于其轴线方向是轴对称的,所以可以省掉θz方向的旋转,只需要5个自由度就可以确定副反射面的位置。又考虑到重力变形相对于俯仰面是左右对称的,所以为了抵消重力变形,副反射面在左右方向平移和左右方向转动也不用调整,仅需要3个自由度实时调整就可以达到抵消重力变形的目的。这3个自由度分别是俯仰方向平移(y)、副反射面轴向方向平移(z)和俯仰方向转动(θx)。从电气方面考虑,这5个自由度中调整俯仰方向平移,副反射面轴向方向平移和俯仰方向的旋转就可以对抵消重力变形而达到满意的效果,即五轴电动调整,其中三轴电动实时调整。
天线副反射面重力下垂随俯仰角变化数据的标定
数据标定的判据
在进行天线副反射面实时修正数据的标定时,可供选择的判据有两个:一个是天线增益,即标出使天线增益最大化的副反射面位置和角度数据;另一个是和方向图第一副瓣,即标定出使第一副瓣满足要求且平衡度最佳的副反射面位置和角度数据。
由于天线辐射方向图第一副瓣的平衡度对天线副反射面重力下垂最为敏感,故首选第一副瓣平衡度作为副反射面修正数据标定的判据;而天线和方向图顶部较为平坦,以天线增益为依据进行副反射面位置调整时,天线增益的变化不如第一副瓣平衡度明显,因此以天线增益最大化作为副反射面实时修正数据标定的辅助判据。
辐射源的选择
副反射面实时修正数据的标定要在天线俯仰角工作范围6°~90°内进行,这就决定了标定所用的辐射源只能用射电星或地球同步轨道卫星。使用射电星作辐射源的优点是可以满足6°~90°范围内进行标定;缺点是射电星信号太弱,仪器只能测出和峰值附近的方向图,无法清晰测出和方向图第一副瓣。使用地球同步轨道卫星的优点是可以完整、清晰测出天线的和方向图,缺点是无法在高仰角范围内对副反射面位置修正数据进行标定(天线在佳木斯地区对地球同步轨道卫星的理论最高仰角只有37°)。综合上述两种辐射源的特点,DSF1在仰角37°以下使用卫星下行信标作为副反射面实时修正数据标定的信号源,而在仰角37°以上使用射电星作为信号源。
鉴于地球同步轨道S和X频段卫星很少,无法满足仰角37°以下副反射面实时修正数据标定的要求,因此选用数量很多的Ku频段通信卫星作为信号源对副反射面实时修正数据进行标定。由于频率越高,对天线重力变形越敏感,因此只要Ku频段天线方向图第一副瓣平衡度满足要求且上下副瓣不平衡小于或等于1dB,则X频段和S频段方向图一定满足要求。
标定方案
结合上述辐射源特点及副反射面实时修正数据判据的特点,DSF1副反射面实时修正数据标定最终方案如下:
①使用Ku频段馈源,在天线仰角37°以下利用卫星下行信标作为信号源对副反射面实时修正数据进行标定。为此,专门设计一套接收频率为11.20~12.75GHz、极化方式为左右旋输出的馈源,其辐射方向图与X频段馈源一致(保证天线方向图第一副瓣与X频段一致),然后放置于X频段馈源位置(Ku喇叭相位中心与X喇叭相位中心重合),等效于X频段馈源,再进行天线在不同仰角时副反射面位置和角度的标定。
②使用X频段馈源,在俯仰角6°~90°范围内使用射电星作为辐射源测量天线和峰值电平。在仰角37°以下只观察天线和方向图峰值电平并作为基准,不调整副反射面;在仰角37°以上按照上述和峰值电平为基准进行观察并调整副反射面。
标定步骤
副反射面位置和角度数据标定步骤如下:
①使用Ku频段馈源,在仰角37°以下进行副反射面实时修正数据标定。由于天线面拼装时对天线重力变形是在仰角35°预调的,因此,首先对准IS-709或中卫一号卫星调整副反射面(5个自由度都要调整),使得方向图最佳;然后,以此时副反射面位置为基准,天线仰角在37°以下每5°左右一个点,在不同仰角对准卫星调整副反射面(只调整3个自由度,分别是俯仰方向平移y、副反射面轴向方向平移z和俯仰方向转动θx)使得天线方向图最佳,记录一组副反射面位置和角度数据,作为副反射面实时修正的依据存入ACU中。副反射面位置和角度数据标定原理框图如图2-31所示,具体流程如图2-32所示,天线对准可用的Ku频段卫星如表2-4所示。

图2-31 副反射面实时修正数据标定原理框图

图2-32 副反射面位置和角度标定流程图
表2-4 天线对准可用的Ku频段通信卫星

续表

②根据天线仰角37°以下数据外推出仰角37°以上副反射面实时修正数据。在天线对Ku频段通信卫星标定完仰角37°以下的副反射面实时修正数据后,就需要使用射电星对仰角37°以上副反射面实时修正数据进行标定。由于天线波束很窄而且射电星在不停运动,为了使天线波束在仰角37°以上能够较准确地指向射电星,除了在仰角37°以下进行角度标校外,还需要根据上述副反射面实时修正数据拟合曲线,外推出仰角37°以上的副反射面实时修正数据并存入ACU中。在下一步标定工作中,ACU先根据外推数据控制副反射面到达理论位置,再根据接收到的射电星信号电平的大小决定是否对天线副反射面的位置和角度进行调整。
③使用X频段馈源在仰角37°以下观察,在仰角37°以上标定。利用射电星、使用X频段馈源标定副反射面实时修正数据的设备原理框图如图2-33所示。

图2-33 用射电星标定副反射面实时修正数据原理框图
首先选择射电星轨迹在仰角37°以下的弧段进行观测,利用标校子系统的标校计算机实时引导ACU并控制天线指向及程序跟踪射电星,ACU在程序跟踪射电星的基础上调整方位和俯仰角使天线准确指向并跟踪射电星,记录仰角37°以下天线接收到的信号电平PM。
选择射电星轨迹在仰角37°以上的弧段,ACU准确指向并随动射电星后记录天线接收到的信号电平P,如果P≥PM则不调整副反射面;若P<PM则调整副反射面直至P≥PM为止,然后记录天线仰角及副反射面位置和角度数据。由于此过程中,射电星仰角在连续变化但速度很慢,可记录调整副反射面后观测时的俯仰角。
上述标定工作完成后,在设备使用寿命期内,如果天线反射体结构没有意外情况,所标定的数据一直有效并使用,一般不需要重新标定。
副反射面修正工作的重点是尽可能减小天线变形对天线增益和指向的影响。因此,上述标定工作完成并且ACU对天线副反射面实时修正后才能进行最终的角度标校工作。