在BWG天线中,从反射面系统到馈源系统有一个坐标系转换,这个变换的直接后果就是在保持目标偏离天线瞄准轴相对位置不变的条件下,随着天线方位和俯仰的运动,差路信号相对于和路信号的相位在不断地旋转,这个关系可以表示为

式中 dA——天线方位角变化量;
dE——天线俯仰角变化量。

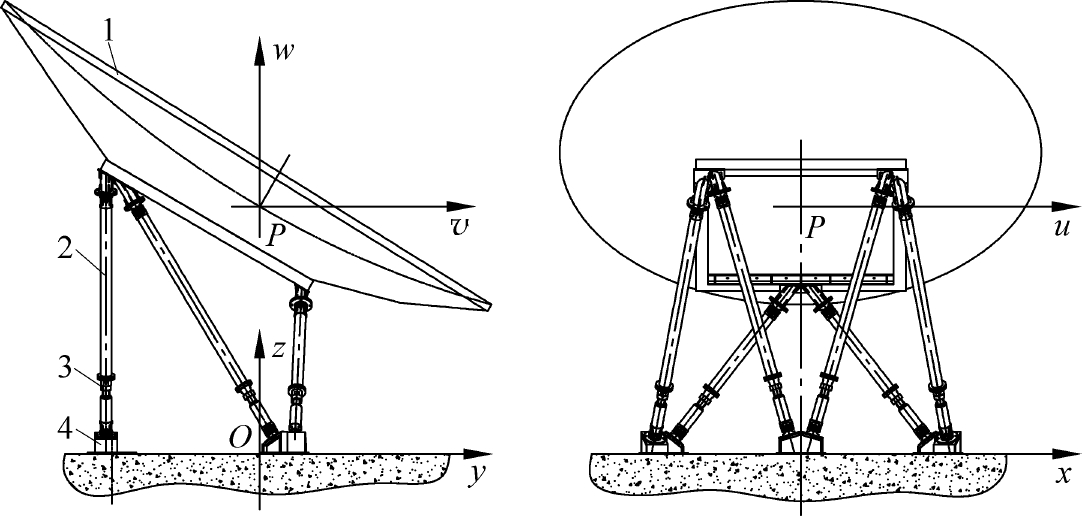
图1-32 BWG坐标旋转示意图
用图1-32来表征BWG的坐标旋转过程。
假定系统已完成相位校准,当前天线指向(A0,E0),目标在俯仰负向偏离天线瞄准轴一个小角度,此时俯仰误差输出一负电压,且方位误差电压满足交叉耦合要求。
在天线从(A0,E0)运动到(A1,E1)时,始终保持目标在俯仰负方向上偏离天线瞄准轴相同角度,按照伺服系统的要求,误差电压输出应该不变。
在BWG系统中,和差相对相位随天线的方位和俯仰运动而线性旋转,图1-32中,差信号相量将从P1旋转到P2,旋转角:

随着天线的运动,解调输出的误差电压逐渐偏离期望值,dφ超过30°后,天线将无法对目标实施稳定自动跟踪。
因为在BWG系统中存在坐标旋转,需要对解调输出的误差电压进行修正,称为BWG坐标变换,式(1-109)中给出将基带输出误差电压转换为方位电压和俯仰电压的过程:

式中 Uxel——基带解调输出的交叉俯仰误差电压;
Uel——基带解调输出的俯仰误差电压;
E-A——波束波导逆变换角;
1/cosEL——天线正割补偿修正系数;
UAZ——方位误差电压输出;
UEL——俯仰误差电压输出。
由于ACU对基带解调输出的误差电压进行了一个坐标旋转,所以,快速校相过程中,利用误差电压来反算相位误差的公式也需要进行对应修正。
首先利用公式:

对原始误差信号乘上一个旋转矩阵,计算出经坐标旋转后的误差电压输出 和
和 ,然后利用表1-24中的公式来计算和差通道相位偏差。
,然后利用表1-24中的公式来计算和差通道相位偏差。
表1-24 波束波导网络通过误差电压反算相位误差的修正公式表

除了反算和差支路相位差的公式略有差别外,波束波导系统中的快速校相步骤与常规测控站快速校相步骤完全相同。