系统实施快速校相时,地面天线系统工作在数引模式下,确保目标落入天线主瓣内。在天线66m口径面上建立天线坐标系,用来描述目标和天线瞄准轴的偏差,见图1-29。
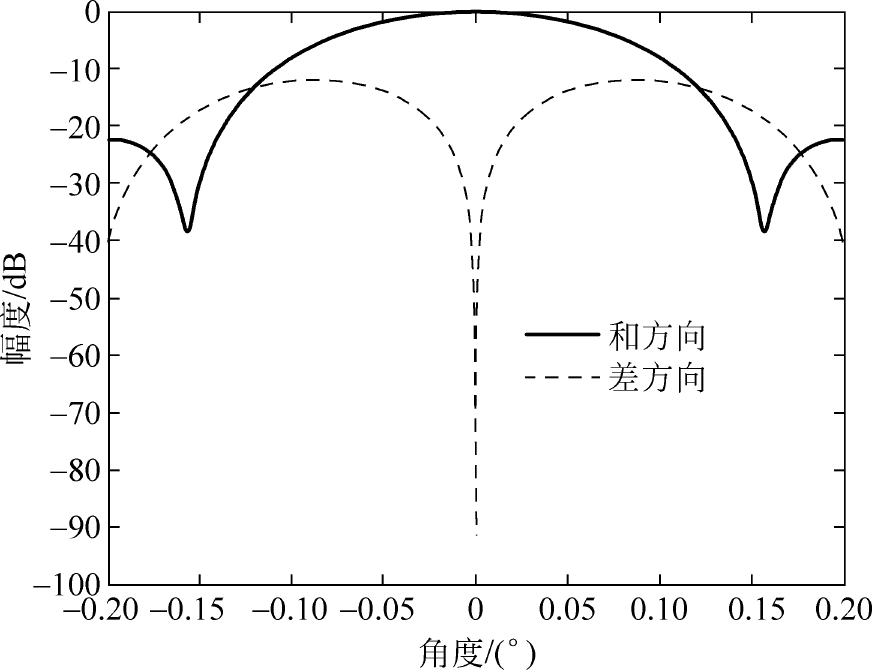
图1-29 和差幅度方向图
当天线瞄准轴恰好对准目标时,和信号最大,差信号最小,可以用图1-29中的和差幅度方向图来表征。当目标分别在el正向、el负向、xel正向和xel负向偏离天线瞄准轴时,和差信号之间的相位关系如表1-21所示。
表1-21 和差相对相位关系表

注:ϕ为由于和差链路相位未校准而带来的残留相位误差。
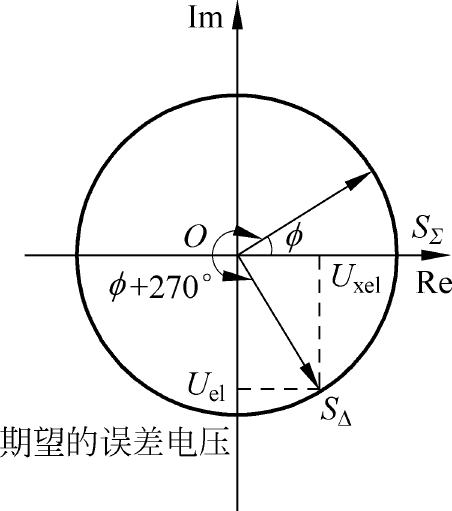
图1-30 误差电压解调示意图
以目标在xel方向对正,el负向偏离瞄准轴为例,假定系统未进行相位校准,差信号相位超前于和信号相位ϕ,当0°≤ϕ≤90°时,解调输出的误差电压如图1-30所示。可利用下式计算出相位角ϕ:

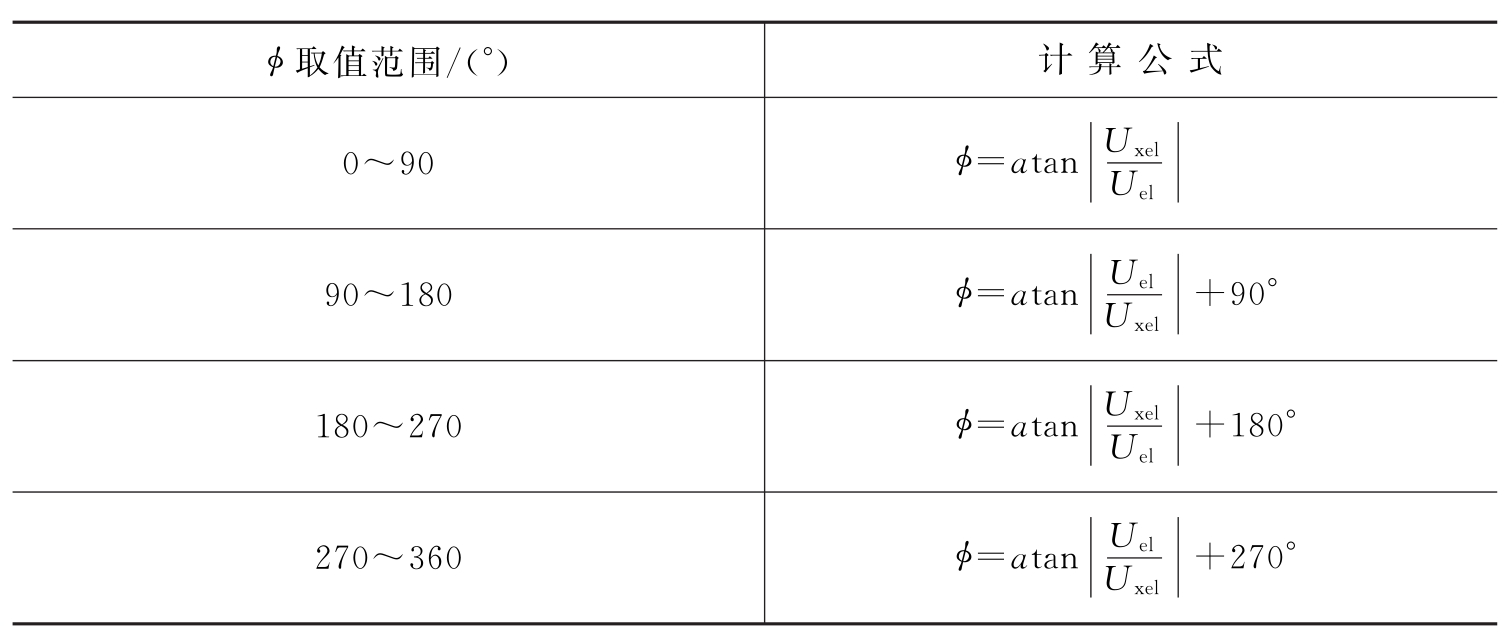
根据目标沿el轴负向偏离瞄准轴解调输出的误差电压,确定误差电压点所在象限,对ϕ最终取值进行修订,如表1-22所示。
表1-22 通过误差电压反算相位误差公式表
将用于解调的复数坐标系逆时钟旋转ϕ(即将和路参考信号复相位加ϕ),即可解调输出满足要求的误差电压。相位调整后,当目标沿el负向偏离瞄准轴时,输出el轴上的误差电压为一负值,xel轴上的误差电压接近于零。复数坐标系旋转的过程即相位校准的过程。
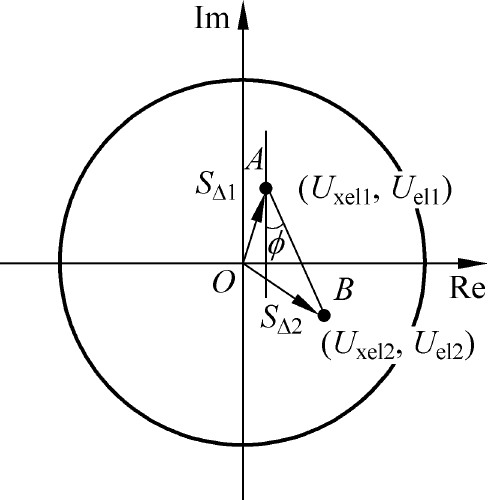
图1-31 相位偏差引起的误差电压平移示意图
在快速校相工程应用过程中,由于引导数据的精度有限,所以无法确保差波束零点对准目标,在初始位置A将会解调输出一个误差电压,记为(Uxel1,Uel1);控制天线,使得目标由位置A沿el轴负向偏离一个小角度时,由于相位偏差ϕ的存在,误差电压将会沿线段AB从A点向B点运动,直至B点,解调输出(Uxel2,Uel2),如图1-31所示。
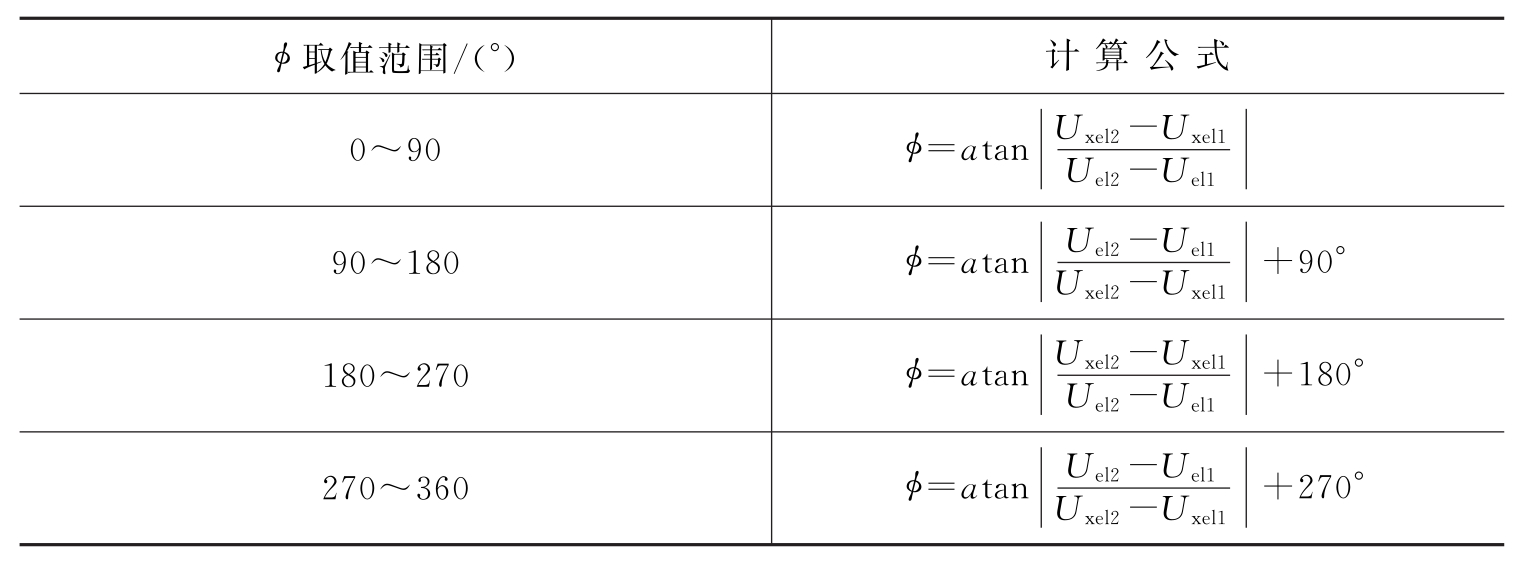
在目标初始位置偏离天线瞄准轴的快速校相方式下,通过误差电压反算相位误差的公式需要在表1-22中公式基础上进行修正,如表1-23所示。
表1-23 通过误差电压反算相位误差的修正公式表
综合上述分析,总结快速校相的步骤如下:
1)天线工作在数字引导模式下,引导精度须满足将目标被主瓣照射的要求;
2)对解调器设置初始相位和初始误差斜率,初始相位通常置为零,误差斜率与天线口径、工作频段相关,以差信号低于和信号15dB时,误差电压输出+3.5V为标准进行初始误差斜率设定;
3)控制天线,使目标在俯仰负方向叠加一个偏置,通常为半波束宽度的1/4,此时要确保目标仍然落入天线主瓣范围之内,接收机不失锁;
4)根据此时解调输出的误差电压,利用表1-23中的公式计算相位差ϕ;
5)根据误差电压极性和ϕ,调整参考信号相位,使得此时解调输出的俯仰误差电压为负值,方位误差电压尽可能接近于零,或者交叉耦合不大于1/7;
6)检查误差电压是否满足伺服系统要求的误差信号斜率要求,若不满足,对误差电压输出电平进行增益修正;
7)根据接收信号的旋向特性,调整方位误差电压极性(可以通过对解调基准反相实现);
8)装定相位、误差电压输出增益,完成快速校相过程。